
Ros With Rb8 6 Slam
除了運動學外,ROS 上的 SLAM 套件也是非常兇猛的。這邊會簡介幾個不同種類的 SLAM,並說說我那快樂夥伴的 2D SLAM 唷!
3D SLAM
我個人有用過的有 RTAB-Map 和 Rgbdslam。如果要應用在機器人身上,建議選擇適當的解析度(例如 QVGA、QQVGA )傳深度圖與彩色圖回到桌電或筆電上,再利用 depth_image_proc 把深度圖轉為點雲圖再開始做 3D SLAM。
Graphic SLAM
僅用過 ORB-SLAM,是只需要一個 camera 就可以完成的 SLAM,我個人認為是不錯的室外 SLAM 解法。因為紅外線不適合在室外使用,所以利用圖像特徵點與圖型理論結合真的是很棒的想法!
2D SLAM
因為小弟的快樂夥伴沒裝 encoder 在輪子上,所以就沒有使用 gmapping,而是使用 hector_mapping。但我個人是建議大家將輪子裝上 encoder 並且嘗試 gmapping 看看,效果應該是很不錯的,印象中使用 Kinect 來當作 Laser Scanner 就能有不錯的效果,而且機器人還是必須要有反饋才方便進行 debug 等工作。
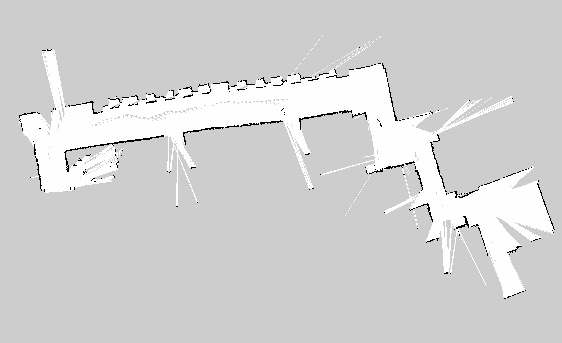
言歸正傳,我仰賴著高精度的 Hokuyo URG_04LX 來嘗試 2D SLAM,設定可以參考這篇文件。實做上,我將 Laser Scanner 的資訊由 eBox 的 ROS Fuerte 傳遞到 laptop 上,再交由運算能力較強的 laptop 執行 hector_mapping,以免 eBox 無法負擔計算量。
DEMO 影片與結果圖
Leave a comment