
Ros With Rb8 3 Partner
共遊機器人世界當然要找個機器人結伴啦,一起來看看我的這台機器人吧!
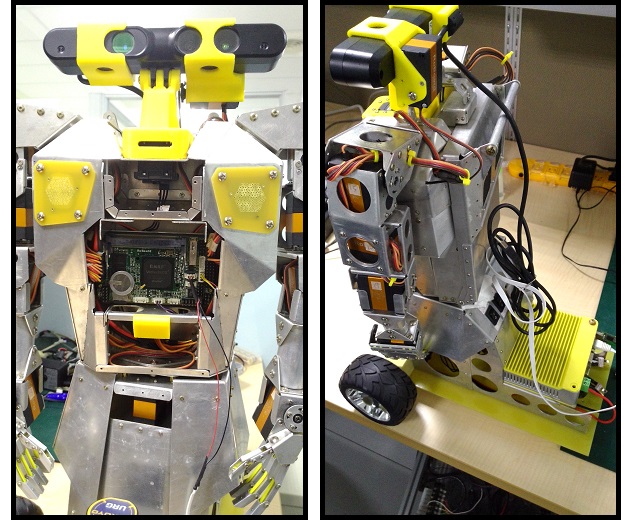
My Partner!
這隻機器人是我去年的聖誕禮物,當時 ROS Indigo 出了一段時間,不過因為 ROS Hydro 上面的文章還是比較豐富一些,我就以下面這樣的架構開始來嘗試一些 ROS 套件。
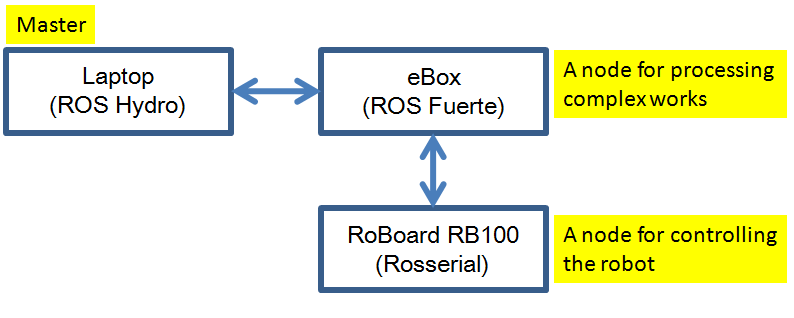
我是拿一台筆電來當作 Master node,負責蒐集機器人身上傳感器的資訊加以運用,也可以利用這些資訊來決定機器人接下來要做哪些事情;而 eBox 則是透過 wifi 網路與 laptop 溝通,一方面可以收取 laptop 的控制命令傳給 RoBoard 執行,一方面可以幫 RoBoard 負載平衡,把一些需要計算或較耗 CPU 資源的工作吃下來;而 RoBoard 搭配 RoBoIO 控制伺服馬達很方便,所以就拿來接收控制方面的指令來控制機器人。接著我們也來看一下這台機器人的其他裝備:
- Servo:機器人的雙手是四軸的手臂,伺服馬達是 RS-1270,手掌還有一顆伺服馬達可以控制手的開合。腰部、頭部也都有馬達控制,而輪子則是由兩顆 AX-12 來控制。
- Sensor:頭部搭載 Asus Xtion PRO LIVE。身體前方還有一台 Hokuyo URG-04LX。
- Battery:前輩幫我在露天買的兩顆鋰電池,是模型玩具在用的那種,因為我也看不出廠牌就沒寫上來 >__<。一顆是給 eBox,一顆是給 RoBoard。
接下來談談 ROS 之間的溝通,laptop 的 Hydro 與 eBox 的 Fuerte 溝通上,可能會出現 ROS message 有些型別是其中一方沒有的狀況,這時候就必須在程式裡多做一次轉換,雖然有些麻煩跟效能上的損失,但基本上比較少遇到,即便遇到也都是可以解決的。而 RoBoard 上裝的 OS 為 Free DOS,依靠 Rosserial 來與 eBox 的 Fuerte 溝通。大家可能會很好奇 Rosserial wiki 頁上沒有 rosserial_dos,這邊我是利用 DY Hung 大大幫忙 porting 的版本,在小弟的 github 上可以找得到,用來控制 86Duino 和 Free DOS 都沒問題,不過版本停在 Indigo 的樣子,應該不會繼續更新上去。
呼,今天一口氣貼了好多 link(羞愧),之後應該會慢慢剖析整個 ROS 如何運作這台機器人,不過小弟實在要好好構思該怎麼寫>”<,接下來可能也會穿插一些 86ME、86Duino 的戲分。
Leave a comment