
Aiservo86 Library
86Duino IDE 在下次更新中預計新增一個 AIServo86 涵式庫,此涵式庫可以說是 Servo86 的 AI 伺服機版本。
原來的 Servo86 專注在 RC 伺服機控制上,而 AIServo86 則是專注在 AI 伺服機上(目前主要支援 Robotis Dynamixel 廠牌之伺服機,包含 AX-12、RX-28、MX-28、XL-320)。
程式架構
實際使用上可以參考 AIServo86 涵式庫說明,且還有範例可供參考,這邊主要是分享此涵式庫的架構。在設計階段,為了要保留日後加入更多不同廠牌、型號的伺服機的彈性,使用了分層的方式進行抽象化,提出伺服機的核心功能進而實作出 AIServo86,具體架構如下圖:
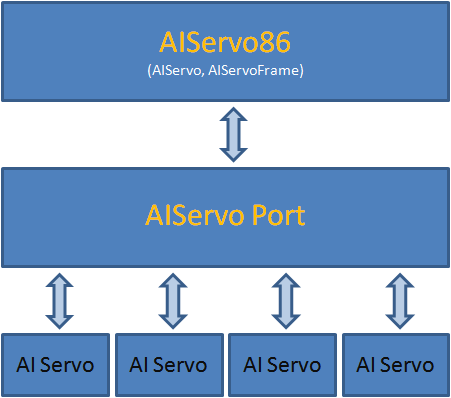
如同 Servo86,AIServo86 中最核心的部分就是 AIServo 和 AIServoFrame 這兩個物件,AIServo 供使用者設定目標位置、運動時間、運動速度等特性,也提供了暫停、停止、釋放伺服機等命令讓機器人控制更加有彈性,而 AIServoFrame,則是導入 Frame 的概念,同時控制多顆伺服機來呈現機器人動作更加方便,除了這些以外還有較進階的 Cubic Spline 路徑規劃、Realtime Mixing 補償功能,這些功能也都已經加入了,有興趣的朋友可以看前兩篇 [1, 2] 相關的的文章。拉回程式架構身上,要讓 AIServo 和 AIServoFrame 可以正確支援多種不同控制方式的伺服機(可能有傳輸方式的不同,如 I2C、com port。或是 protocol 的不同,如 Dynamixel 1.0 和 Dynamixel 2.0),我們要再透過一個 AIServo Port 抽象化伺服機的控制方法,主要的方式就是 AIServoPort 裏頭有許多 virtual function,而這些用來控制伺服機的 virtual function 會依照伺服機不同的控制方式被實作在最下層,如此一來,以後要新增伺服機的支援時,就將底層需要用到的涵式搞定即可。也許大家會疑惑,這樣是不是有些專屬於某型號伺服機的功能是不是就用不到了,確實在 AIServo86 中沒有直接的將這些功能設計進去,但可以透過 AIServoPort 把自己想要的功能實作出來,以目前實作中的例子來說,XL-320 伺服機的 LED 燈功能,調整伺服機轉速功能等等都可以透過 AIServoPort 去呼叫了,所以功能完整性也是非常足夠的。
原始碼
對程式有興趣的朋友可以在這找到原始碼,裏頭也有範例可供使用上的參考。
DEMO
因為 PPAP 正夯的關係,同事就幫忙用 AIServo86 做了這個 DEMO 影片,影片內的機器狗使用的是 AX-12 伺服機 XD
Leave a comment